Modernizácia železníc: Aké technológie sa používajú v geodetickej praxi?



Budovanie železničnej infraštruktúry si pri súčasnej dynamike realizovaných stavieb vyžaduje využívanie moderných geodetických postupov a prístrojov. Článok je zameraný na technológie merania, ktoré dokážu v každej fáze výstavby efektívne reagovať na požiadavky stavby svojou rýchlosťou, kvantitou a kvalitou dodaných dát.

Prístrojová technika vo forme GNSS aparatúr, robotických meracích staníc, meracích vozíkov, dronov s využitím leteckej fotogrametrie alebo skenovania je každodenným nástrojom geodeta pri výkone meračských činností, a to od predprojektového zamerania po geodetickú dokumentáciu skutočného vyhotovenia stavby.
Železničná a cestná doprava sú bezpochyby jedným zo základných kameňov fungujúceho hospodárstva štátu, keďže zabezpečujú presun tovaru a osôb s cieľomvýkonu povolania alebo voľnočasových aktivít.
Po vzniku SR sa u nás vybudovalo približne iba 200 km diaľnic, preto sa kládol vyšší dôraz na budovanie diaľničnej infraštruktúry ako na investovanie do modernizácie železníc. Tým sa železnice dostávali rokmi na „vedľajšiu koľaj“, a to aj napriek tomu, že železničná doprava je dlhodobo považovaná za najekologickejšiu formu dopravy s jednopercentným podielom na emisiách.
Vstupom Slovenska do EÚ sa realizácia modernizácie železníc zvýšila, keďže strategickým cieľom EÚ je preklápať podiel prepraveného tovaru a osôb na stranu koľajových tratí. Modernizácie železničných tratí preto v ostatných dvoch dekádach dostali vyššiu prioritu. Investičný dlh si však v súčasnosti vyžaduje veľkú akceleráciu projektovej a stavebnej pripravenosti, pričom s týmito dvomi zložkami je priamo spojený aj výkon geodetických činností pomocou moderného prístrojového a softvérového vybavenia.

Železničný zvršok
Železničný zvršok prenáša zaťaženie z dopravy na železničný spodok. Vo finálnom stave tvoria vybudovaný železničný zvršok koľajnice, podvaly a štrkové lôžko. Smerové a výškové vedenie modernizovanej trate je definované realizačnou projektovou dokumentáciou, ktorá rešpektuje záväzné súradnicové a výškové systémy na Slovensku.
Tie sú v železničnom koridore, ktorý je predmetom modernizácie, definované Základnou vytyčovacou sieťou (ZVS). ZVS je spravidla realizovaná ťažkou stabilizáciou s hĺbkovým pažením. Pre praktickosť a dodržanie geometrickej presnosti pri podrobných geodetických prácach sa ZVS dopĺňa tzv. podrobnou vytyčovacou sieťou (PVS). ZVS a PVS predstavujú geodetické základy pre určitý úsek stavby, čím zabezpečujú homogénnu geometrickú kostru pre každého účastníka výstavby.
Na prípravu koľajového lôžka do fázy pred pokladaním koľajových polí sa v súčasnosti využívajú kombinácie technológií GNSS (globálny navigačný satelitný systém) a terestrických meraní pomocou UMS (univerzálna meracia stanica). Z GNSS technológií sa najviac používa kinematická metóda v reálnom čase (RTK – Real Time Kinematic). Základom je využitie minimálne dvoch prijímačov GNSS s tým, že jeden funguje ako báza (nepohyblivý) a druhý ako rover (pohyblivý).
Báza aj rover vykonávajú fázové meranie, pričom je medzi nimi pomocou rádiomodemu neustále rádiové spojenie, alebo funkciu referenčnej stanice preberá služba permanentných staníc GNSS. Technológiu je možné využívať na riadenie stavebných strojov, napríklad rýpadiel alebo buldozérov.
Princíp spočíva v už spomenutej metóde RTK s využitím referenčnej stanice umiestnenej na geodeticky určenom bode, odkiaľ sa zistená korekčná informácia v priestore odosiela rádiovým signálom do riadeného stavebného stroja pre aplikáciu priestorovej korekcie. Pre plnohodnotné automatizované riadenie je potrebné zabezpečiť digitálny TIN model koľajového lôžka v požadovanej výškovej hladine podľa aktuálnej pracovnej fázy.

Takýto dátový model je vyhotovený na podklade platnej projektovej dokumentácie. Pri synchronizácii a zavádzaní modelu je nutná súčinnosť strojníka a geodeta vzhľadom na kontrolu priestorovej polohy radlice stroja so vzťažným pripojením na blízke body ZVS, resp. PVS. Ak nie je možné použiť GNSS, riadenie stavebného stroja sa vykonáva prostredníctvom UMS a terestrického merania. Vtedy je GNSS anténa nahradená odrazovým hranolom a robotizovaný systém zabezpečuje presným meraním uhlov a dĺžok určenie polohy a výšky vo vzťahu k ZVS.
Priestorové a podrobné vytyčovanie osi koľaje sa realizuje obvyklými technológiami na vytyčovanie s využitím kombinácie GNSS a robotizovaných UMS. Zvýšenú pozornosť treba venovať presnosti pri vytyčovaní a osádzaní výhybiek, vytyčovaniu osi koľaje v mieste smerových oblúkov a v neposlednom rade pri vytyčovaní v miestach budúcich, resp. vybudovaných nástupištných hrán, kde je potrebné kontrolovať aj relatívne vzťahy nadväzujúcich objektov na dodržanie priechodového prierezu.
Smerová a výšková úprava koľaje systémom ASP
Technológia strojného podbíjania má pri výstavbe železníc veľmi dlhú históriu. Zvýšené tempo budovania železníc vo svete pritom vytváralo tlak aj na inovatívne riešenia v oblasti geodézie. Najmodernejšie strojné podbíjačky si vyžadujú okamžité a presné digitálne dáta pre smerovú a výškovú úpravu koľaje.

Na Slovensku sa v súčasnosti pre prípravu dát a navádzanie ASP využíva technológia meracieho vozíka a robotickej meracej stanice.
Príprava dát s použitím špecializovaného softvéru sa začína vypočítaním priestorovej osi. Podkladom na prípravu je platná projektová dokumentácia. Výpočet a kontrola parametrov jednotlivých smerových a výškových prvkov trasy až po finálny priestorový tvar koľaje sa realizuje v počítačovom prostredí so špeciálnym softvérovým vybavením. Pri modernom projektovaní dostane geodet priamo výmenný formát trasy, ktorý takéto dáta už obsahuje.
Pri výpočte 3D osi koľaje je zahrnutá aj kontrola projektovej dokumentácie. Na porovnanie geometrickej polohy koľaje (GPK) s projektom sú potrebné vstupné dáta meranej koľaje. Na základe meraných dát sú určené vstupné hodnoty zdvihov a posunov, ktoré sa následne odošlú do ASP (email, USB). ASP so svojím technologickým vybavením vykonáva úpravu koľaje a kontrolu relatívnych parametrov koľaje. Univerzálna meracia stanica sleduje odrazový hranol na meracom vozíku, pričom pripojenie do priestorového systému stavby je zabezpečené cez body PVS.
Opakovaným postupným meraním podbitej koľaje a smerovou a výškovou korekciou sa zabezpečí vyrovnanie koľaje do projektovaného stavu. Geometrická kvalita zrealizovanej koľaje sa vyhodnocuje podľa STN 73 6360-2 čl. 5.4.1. Krajné hodnoty sú definované pre šíru koľaj v priamej a oblúku a takisto koľaj pozdĺž nástupišťa. Pri ňom má poloha osi koľaje ku hrane nástupiska nulovú toleranciu, preto je zvlášť dôležité dodržiavať postupy a technológiu merania.
V neposlednom rade je nutná komunikácia zhotoviteľa nástupišťa a koľaje s geodetmi a projektantom, ktorý určuje minimálnu osovú vzdialenosť hrany nástupišťa od koľaje v súlade s príslušnými normami.
Výstupom je geodetická dokumentácia, v ktorej je vyhodnotené smerové a výškové vedenie koľaje vo forme tabuliek a grafov. Okrem iného sa vyhodnocuje aj prierez koľaje vo vzťahu k umelým prekážkam a stav po definitívnom „podbití“. V dokumentácii sa uvádza aj zaistenie koľaje pre kontrolnú činnosť správcu počas prevádzky.
Možnosti využitia dronov na stavbách železničnej infraštruktúry
Dron, označovaný aj ako UAV (bezpilotné letecké zariadenie), predstavuje nosič ďalšieho snímača, ktorý definuje metódu zberu dát pre územia malého rozsahu dvomi základnými geodetickými metódami – ide o letecké meračské snímkovanie a letecké laserové skenovanie (LiDAR).
Spojenie bezpilotných leteckých metód a GNSS s využitím RTK je efektívnou technológiou mapovania, ktorá vnáša do tradičnej geodézie nový rozmer, a to ako v interpretácii množstva získaných dát, tak aj v následnom spracovaní a vo výslednom produkte – napríklad ortofotomapa, digitálny terénny model (DTM), digitálny model povrchu (DSM), mračno bodov, textúrovaný mesh, 3D model depónie, výkopu a pod. K doplnkovému využitiu zberu údajov prostredníctvom UAV patrí hyperspektrálne skenovanie, termovízne snímkovanie a video.

Tieto typy výstupov nachádzajú efektívne využitie už vo fáze predprojektového zamerania, keď sa kombináciou vyššie uvedených geodetických metód získa nielen 3D mapový podklad pre projektanta, ale súčasne aj ortorektifikovaný obrazový materiál slúžiaci na rôzne účely pre spätnú kontrolu, resp. pasport stavbou dotknutého okolia.
Počas výstavby možno sledovať priebežný stav objemu skládkovaných materiálov a v pravidelných intervaloch sledovať rozostavanosť jednotlivých objektov či celku, a to buď formou textúrovaných modelov alebo videa. Hlavnou výhodou leteckých meračských prác je získanie veľkého množstvo dát (informácií) za pomerne krátky čas.
Možnosti laserového skenovania
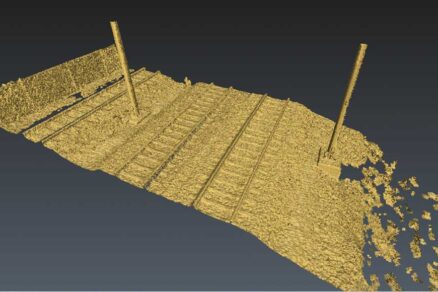
Laserové skenovanie, tzv. Lidar (Light Detection And Ranging), predstavuje metódu získavania priestorových údajov, keď sa na základe času šírenia impulzu laserového lúča, ktorý sa odrazí od meraného objektu, meria vzdialenosť tohto objektu.
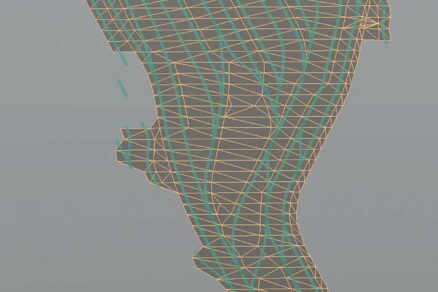
Výsledkom je 3D mračno bodov, ktoré je po softvérovom spracovaní možno interpolovať do formátov uvádzaných v predošlých statiach (digitálny terénny model/DTM, digitálny model povrchu/DSM, textúrovaný mesh). Pri kombinácii s použitím dronu alebo meracieho vozíka prináša laserové skenovanie výhody pri získavaní dát, ktoré sú následne použité na predprojektové, dokumentačné, fakturačné, ale aj revízne účely.

Najmodernejším spôsobom kontroly priechodného prierezu je vyhodnotenie pomocou skenera umiestneného na meracom vozíku alebo vozni, keď dokážeme takmer v reálnom čase sledovať potenciálne kolízie.
Záver
Pri modernizácii železničných tratí sa kladie dôraz na bezpečnosť, rýchlosť a komfort cestujúcich, pričom tieto požiadavky sa prenášajú do všetkých odvetví, ktoré sa na modernizácii podieľajú. Využívanie moderných geodetických technológií zrýchľuje a uľahčuje prácu geodeta a zhotoviteľa.
Tento pokrok si však vyžaduje súbeh aj na legislatívnej úrovni pri zavádzaní nových technologických postupov v podmienkach budúcich projektov. Do rovnocennej hladiny by mala byť ukotvená tiež práca kvalifikovaných špecialistov, ktorí svojimi odbornými rozhodnutiami vplývajú na efektívne využívanie týchto technológií. Napriek využívaniu vyspelých technológií, ktoré nahrádzajú ťažkú prácu ľudí, je dôležité zachovať v tejto rýchlej dobe aj ľudský prístup pri riešení náročných situácií.






Spoločnosť GEFOS SLOVAKIA, s. r. o., pracuje na veľkých dopravných projektoch, kde vyššie spomenuté technológie efektívne využíva.
TEXT: Ing. Michal Janíček, Ing. Marek Matiaš, Ing. Ladislav Karch
FOTO A OBRÁZKY: GEFOS SLOVAKIA, s. r. o., GEFOS, a. s., https://uzolzilina.sk